En dehors du feu, une des choses qui a rendu l’humanité autonome et douée d’intelligence, c’est la possibilité de transporter de l’eau, du feu, de la nourriture, etc. Cette forme de transport a permis à l’humain d’être mobile et de ne plus dépendre d’un lieu d’ancrage pour sa survie. Cette autonomie, nous l’avons toutes et tous encore aujourd’hui dans nos poches, dans nos sacs, dans nos outils dématérialisés aussi. Cette sorte d’amphore, dans sa forme la plus primitive se retrouve aujourd’hui revisitée par un projet intitulé Piaggio Fast Forward, issu d’une division innovante du constructeur Piaggio, vous savez, ceux qui ont inventé le scooter Vespa et qui produisent aujourd’hui des motos, scooters et cyclomoteurs.
Ce projet de robot part du postulat qu’il est encore difficile de construire un robot de livraison entièrement autonome puisqu’il doit fonctionner seul dans des environnements parfois difficiles d’accès et qu’il doit être fiable et efficace. C’est ainsi, qu’est né Gita, un robot « suiveur » capable de porter pour l’instant une charge de 19 kilos et se déplacer jusqu’à 35 kilomètres à l’heure.

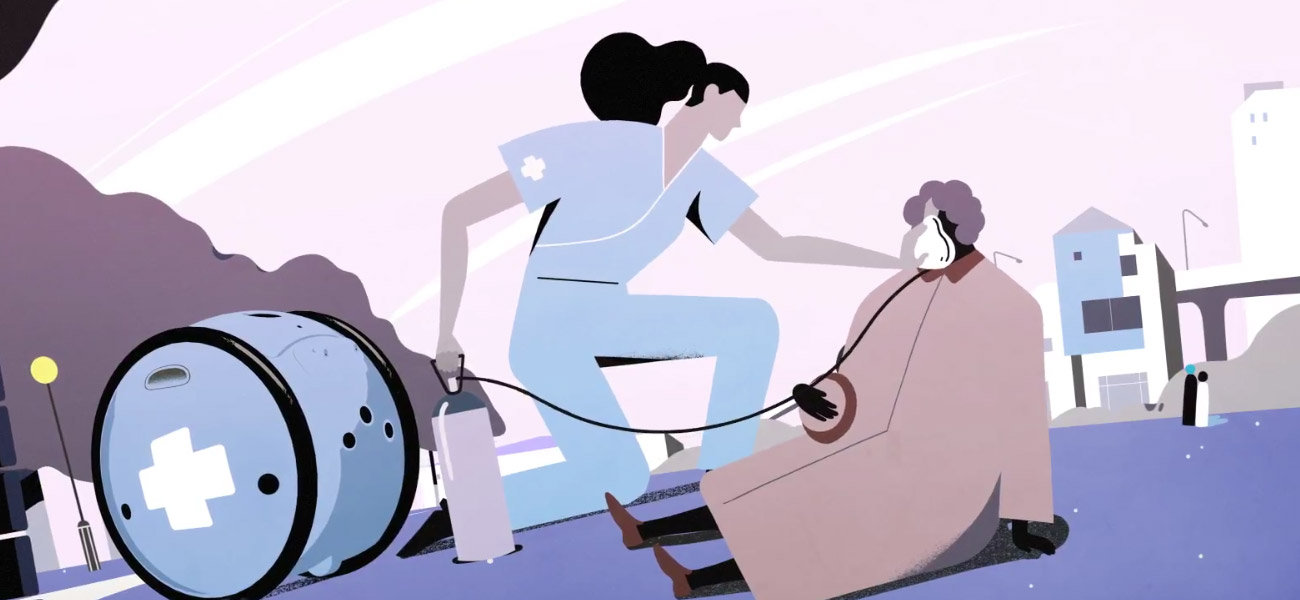
Le scénario illustré
Le postulat de ce projet est aussi de dire qu’il est important de marcher, de se déplacer à pieds puisque c’est bon pour la santé et l’environnement mais qu’il est parfois difficile de faire toute ses courses en magasin avec un sac à dos ou un simple sac de course. C’est la même chose avec le transport de matériel de soin pour des secouristes, de bagages, de matériel pour des personnes à mobilité réduite, etc.


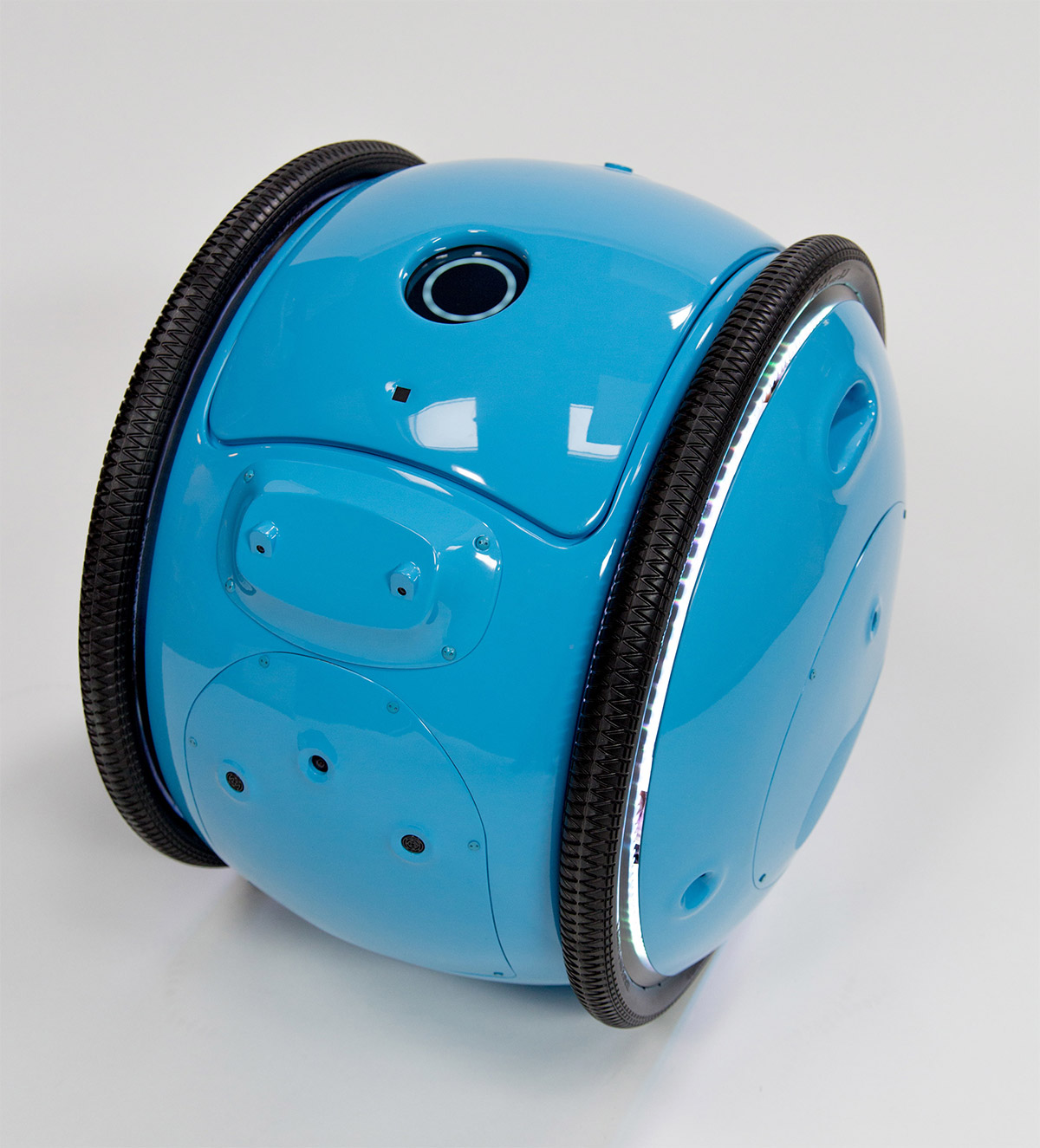
 Pour la partie technique, cela semble déjà fonctionner plutôt bien (voir le prototype ci-dessous) et il faut savoir que le système de navigation principal de Gita repose sur une paire de caméras stéréoscopiques avec lesquelles le robot exécute constamment un scan visuel. Il compare alors son image avec l’image que l’utilisateur obtient grâce à une caméra stéréoscopique sur sa ceinture. Parce que oui, il faudra quand même porter une ceinture pour que Gita nous suive 😉
Pour la partie technique, cela semble déjà fonctionner plutôt bien (voir le prototype ci-dessous) et il faut savoir que le système de navigation principal de Gita repose sur une paire de caméras stéréoscopiques avec lesquelles le robot exécute constamment un scan visuel. Il compare alors son image avec l’image que l’utilisateur obtient grâce à une caméra stéréoscopique sur sa ceinture. Parce que oui, il faudra quand même porter une ceinture pour que Gita nous suive 😉
La conception du prototype
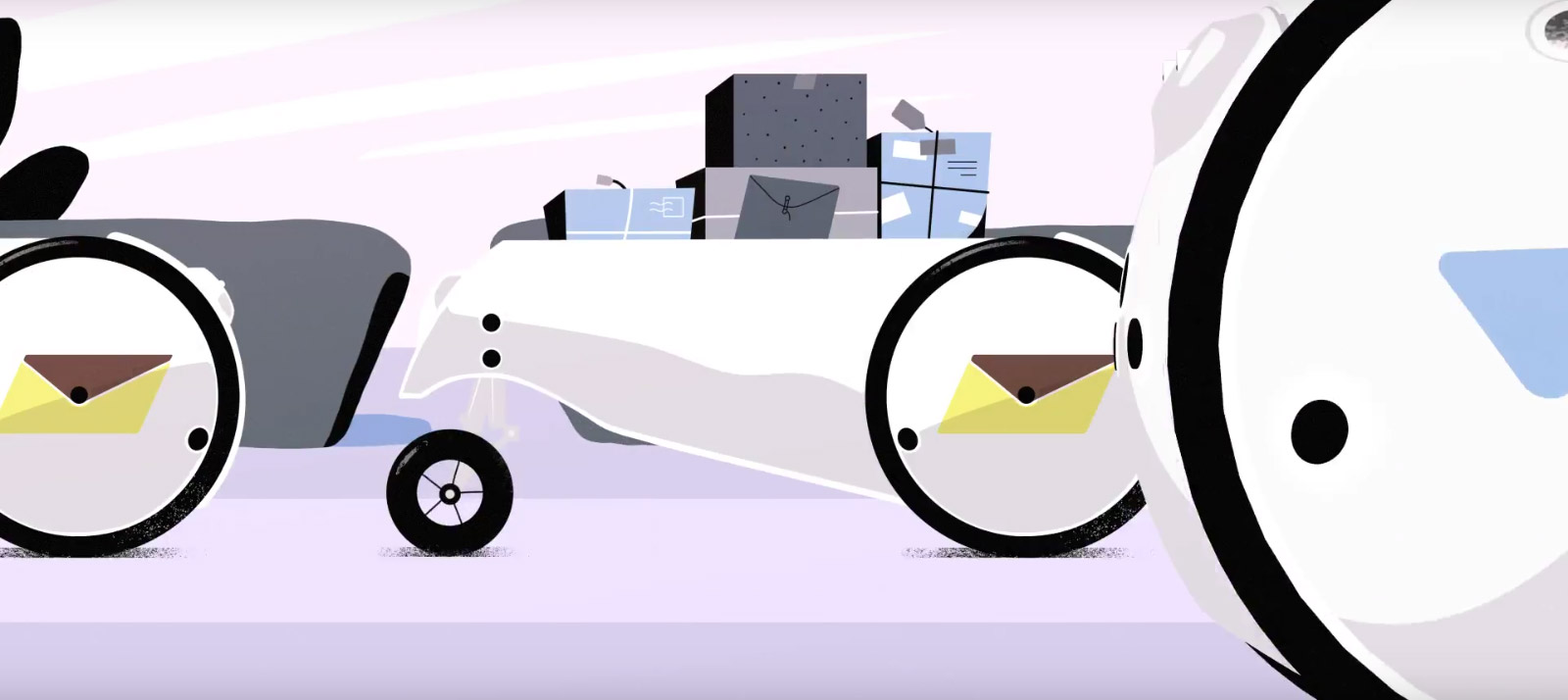
La vision de PFF
Cette sorte de véhicule semi-autonome serait alors une transition avant les robots compagnons et autres véhicules volants qui transportent nos affaires… et je trouve que, venant de la part de Piaggio, c’est une démarche plutôt intéressante. Evidemment, ça n’est pas la première fois qu’une telle idée se présente : souvenez-vous en 2012 avec cette valise nommée « HOP » qui était censée vous suivre partout. Je l’attends toujours 😉
En tous les cas, le projet semble assez intéressant puisque l’entreprise souhaite, après avoir réalisé son prototype, vérifier si les scénarios d’utilisations sont validés par les utilisateurs piétons et aussi par le mouvement humain, si cela fonctionne réellement dans l’usage avant d’aller plus loin. De mon côté, je pense déjà aux usages qui pourraient être intéressants (en dehors de porter mes courses…) comme la problématique du transport de l’eau dans certains pays, comme un certain retour à l’autonomie pour des personnes âgées, comme le transport et la distribution de nourriture aux populations qui en ont le plus besoin… Les idées ne manqueront pas.
Effectivement on peut envisager beaucoup d’usage très intéressant. Apres, on ne le voit à aucun moment monter ou descendre un trottoir ou une cassure dans la chaussée … S’il ne en est pas capable ça va sérieusement restreindre les possibilités. On peut oublier une utilisation par les équipe de secours, le transport de l’eau sur des chemins… Un peu dommage. Enfin à surveiller.